پشتیبانی از دانلود های ناموفق
جزوه سمينار درس كنترل مدرن در پاورپوینت
خرید و دانلود آنی
شماره پشتیبانی
09103705578
جزوه سمينار درس كنترل مدرن
سمينار درس كنترل مدرن ، یک جزوه دانشجویی از درس سمینار که در دانشکده ها با فرمت پاورپوینت
در 11 اسلاید تهیه و تنظیم شده است
برای تهیه این پاورپوینت درس کنترل مدرن میبایست این مقاله را خریداری کنید تا بتوانید فایل کامل را دانلود کنید
ما بطور نمونه قسمتی از متن این تحقیق درس سمینار در قسمت زیر برای کاربران محترم خواهیم گذاشت
قسمتی از متن این پروژه
جزوه سمينار درس كنترل مدرن
adaptive control of robotic manipulators for trajectory tracking
مقدمه اي در مورد ربات ها
ايده كنترل تطبيقي
بكارگيري كنترل تطبيقي براي كنترل ربات
مقدمه اي در مورد ربات ها كنترل مدرن دي 83
امروزه سيستم هاي زيادي در واحد هاي صنعتي و آزمايشگاهي كارهايي كه از عهده انسان برنمي آيد را انجام مي دهند .مي توان بخش عظيمي از اين سيستم ها را تحت مجموعه ربات هادر نظر گرفت.
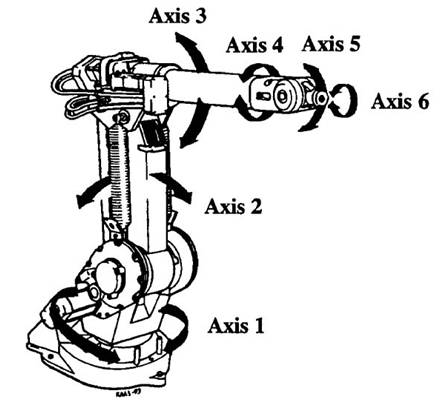
از ديد فني ، يك ربات رشته اي از اجسام صلب در يك سازه سينماتيكي مي باشد.
سينماتيك يك ربات در واقع مطالعه هندسه حركت اهرم هاي يك ربات است و از آنجا كه
انجام وظايف مشخص بوسيله حركت اهرم هاي ربات ميسر مي گردد ،لذا علم سينماتيك جزء ابزار هاي مهم در طراحي و كنترل ربات مي باشد.
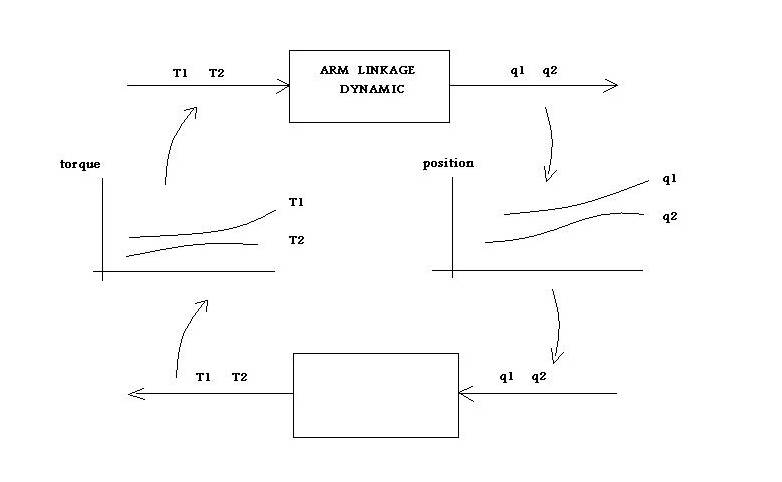
سينماتيك مستقيم و معكوس:
مسئله يافتن موقعيت و جهت براي يك سري جابجايي مفاصل ،مسئله مستقيم سينماتيك ناميده مي شود.
در مسئله سينماتيك معكوس ، بايد بر اساس موقعيت و جهت مشخص شده ربات ، جابجايي مفاصل را بدست آوريم.در واقع پس از حل معادله سينماتيك معكوس، با حركت دادن هر مفصل به اندازه مقدار محاسبه شده، حركت مورد نظر انجام مي شود.
در سينماتيك مستقيم،مكان نهايي ربات براي يك رشته تغيير مكانهاي داده شدهء مفاصل منحصر بفرد است در صورتيكي در سينماتيك معكوس ممكن است چندين جواب براي يك موقعيت وجود داشته باشد و نيز ممكن است براي گستره بخصوصي از موقعيت ربات جوابي وجود نداشته باشد.
اولین نفری باشید که دیدگاهی را ارسال می کنید برای “جزوه سمينار درس كنترل مدرن در پاورپوینت”
برای ثبت نقد و بررسی وارد حساب کاربری خود شوید.
محصولات مشابه
10,000 تومان
گزارش کار بویلر دیگ بخار موضوع:بویلر دیگ بخار فهرست مطالب عنوان: صفحه: مقدمه و شرح محل کار آموزی گزارش کار بویلر دیگ بخار……………………………………… ۱ گزارش کار …………………………………………………………………………………….. ۲ بویلر………………………………………………………………………………………………. ۲ تقسیم بندی بویلرها………………………………………………………………….. ۳ شرایط آب تغذیه دیگ……………………………………………………………………. ۴ موقعیت نصب بویلرها…………………………………………………………….. ۵ مروری بر سیکل های اصلی واحد تولید بخار……… ۵ ساختمان و بدنه
10,000 تومان
پروژه کارآفرینی طرح تولید مبلمان موضوع:طرح تولید مبلمان پیشگفتار: پروژه کارآفرینی طرح تولید مبلمان اکثر مردم کار آفرینی را مترادف با واژه اشتغال و کار یابی می دانند در حالی که کارآفرینی مدیریت و رهبری است که رشد، تغییرو تحول دارد. بنا به تعریف واژه نامه دانشگاهی و بستر: کار آفرین کسی است که
10,000 تومان
طرح توجیهی آموزش پرورش شتر مرغ موضوع: پرورش شتر مرغ چکیده طرح توجیهی پرورش شتر مرغ این طرح درنظردارد تعداد ۲۵۰ قطعه شترمرغ شامل ۱۵۰ قطعه ماده و ۱۰۰قطعه نررا درزمینی به مساحت ۱۲هزارمترمربع درشهرستان مرودشت ( جاده اسماعیل آباد ) روبروی روستای چهارطاق پرورش داده که اولین مزرعه پرورش شترمرغ دراستان فارس
10,000 تومان
کارآفرینی شکر و نیشکر در جهان فهرست مطالب عنوان صفحه مقدمه و هدف ۱- کلیات ۱-۱- کارآفرینی شکر و نیشکر در جهان تولید شکر و نیشکر در جهان ………………………………………………………۹ ۱-۲- تولید شکر و نیشکر در ایران ……………………………………………………….۱۰ ۱-۲-۱- نیشکر کاری در ایران …………………………………………………………….۱۰ ۱-۲-۲- تولید شکر نیشکری در ایران ………………………………………………….۱۱ ۱-۳- نیشکر کاری در

20,000 تومان
پاورپوینت درمورد روشهای تصویر برداری در تشخیص سنگ کلیه موضوع تحقیق:روشهای تصویر برداری در تشخیص سنگ کلیه کلیه ها اندام های حیاتی هستند که برای دفع مواد زائد خون ، تنظیم تعادل الکترولیتی و فشار خون و تحریک ساخت سلول های قرمز خون ضــروری هـسـتـنــد . مطلب پیشنهادی ذرات نانو و نانوفناوری در نمک زدایی
20,000 تومان
پاورپوینت درمان شناختی رفتاری، با تلفیق دو رویکرد رفتار درمانی و شناختی، به افراد کمک می کند تا برای زندگی سالم و موفقیت در زمینه های زیستی، اجتماعی و فرهنگی، آموزش دیده شوند. با استفاده از اصول و قواعد مشتق شده از رشته های مختلف روانشناسی و سایر علوم وابسته، این رویکرد به فرد کمک
20,000 تومان
گواهی های پزشکی گواهی فوت و جواز دفن و جنبه های قانونی وحقوقی آن موضوع:گواهی های پزشکی گواهی فوت و جواز دفن دکترمحمدرضاملکی بورد تخصصی پزشکی قانونی ومسمومیتها گواهی پزشکی سند معتبری است که در باره سلامت یا بیماری یا امر دیگری مربوط به پزشکی تنظیم می شود . گواهی های پزشکی گواهی فوت
10,000 تومان
طرح توجیهی مراحل اول دوخت در خیاطی موضوع:دوخت در خیاطی مراحل اول دوخت ۱)آشنایی با چرخ و عملکرد آن ، طریقه نخ کردن چرخ و چک کردن روغن اگر چرخ صنعتی باشد . ۲) طرح توجیهی مراحل اول دوخت در خیاطی اگر سوزن برعکس بسته باشد نخ پاره می شود شیار سوزن سمت



دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.